 Urban
Joseph Le Verrier
Urban
Joseph Le Verrier
Newton avait donc ouvert une nouvelle
voie scientifique. Pendant deux siècles (jusqu'à l'avènement
de la relativité), un très gros effort scientifique fût
investi dans la compréhension et la mesure du mouvement des corps
du système solaire, avec une précision toujours croissante.
C'est ainsi que s'est crée la Mécanique Céleste,
considérée à l'époque, plus, comme une branche
des mathématiques que de la physique. De très grands mathématiciens
(Gauss par exemple) ont apporté des méthodes mathématiques
très complexes et très performantes pour résoudre
les équations de Newton.
6.1 Succès de la mécanique céleste
Comme nous l'avons vu, le problème à deux corps est complètement résolu (les orbites sont des coniques), mais, et c'est là le problème majeur de la mécanique céleste, l'approximation à deux corps est en réalité une approximation peu efficace pour expliquer avec précision les mouvements des corps du système solaire. En fait, si globalement, le mouvement d'une planète autour du Soleil est avant tout imposé par le champ de gravitation solaire, ce mouvement est perturbé par la présence des autres planètes du système solaire qui agissent gravitationnelement les unes sur les autres. Et là se pose un énorme problème. On peut montrer mathématiquement (cf. Poincaré), que les équations de Newton pour trois corps (ou plus) en interaction gravitationnelle, ne possèdent pas de solutions analytiques. C'est à dire que la diversité des orbites possibles est telle, qu'elles ne peuvent pas s'exprimer avec les fonctions arithmétiques habituelles. On ne peut faire que des approximations. Le travail des mathématiciens s'est alors orienté vers le calcul perturbatif, qui venait de naître grâce à l'avènement du calcul infinitésimal avec Newton et Leibniz. Le plus souvent, cela passe par le calcul de développement en série infinie, méthode bien connue des physiciens.
En dépit de cette difficulté majeure et en utilisant massivement ces nouvelles méthodes mathématiques, les orbites des planètes étaient calculées avec une précision toujours croissante avec à chaque fois un parfait accord avec les observations (sauf dans deux cas comme nous allons le voir). Pendant toute la période 1750-1880, la théorie de Newton ne cessait de remporter succès sur succès, laissant complètement aux oubliettes (dans le milieu des astronomes tout du moins), le désormais vieux système de Ptolémée. Nous reportons ici quelques-unes des plus célèbres découvertes post-newtoniennes.
Peu après la découverte d'Uranus par Herschel (1738-1822) en 1781, l'astronome allemand Elert Bode(1747-1826) découvrit que cette planète avait déjà été observée deux fois auparavant par Tobias Mayer en 1756 et John Flamsteed en 1690, ces deux derniers l'ayant prise à l'époque, pour une étoile. Ces observations supplémentaires permirent de calculer avec précision les éléments orbitaux d'Uranus. Cependant, cette planète commença à dévier assez rapidement de son orbite calculée sur la base des observations précédentes. Cette déviation allait en augmentant avec le temps.
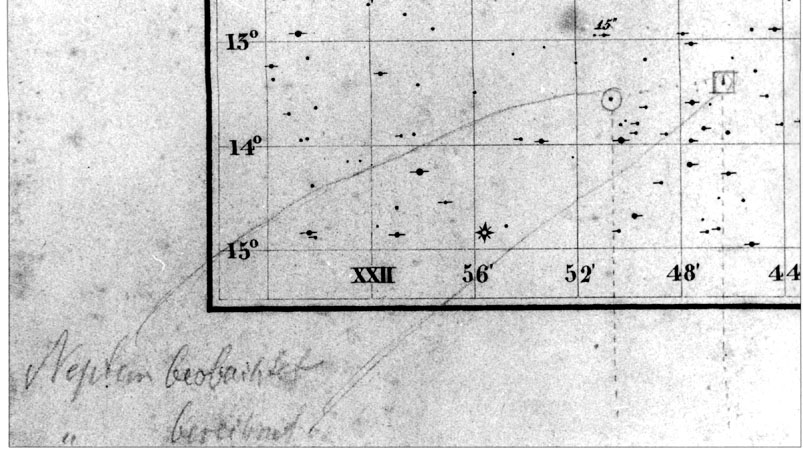
| C'est alors qu'en 1845, l'astronome français, Urbain Joseph Le Verrier(1811-77), fait l'hypothèse qu'une autre planète encore inconnue, pouvait être à l'origine de ces perturbations. Le Verrier un maître de la technique Newtonienne, calcula l'orbite théorique de cette planète. Il pris alors contact avec des astronomes de Berlin qui possédaient des cartes précises du ciel. Ils observèrent le ciel la nuit du 23 septembre 1846 à l'endroit que leur avait indiqué Le Verrier et y virent un objet qui n'était pas présent dans leurs tables astronomiques. C'était la nouvelle planète prédite par Le Verrier, qu'on appela Neptune. | Urban
Joseph Le Verrier |
| La
carte céleste avec laquelle Neptune fut découverte. Le carré
indique la position prévue par Le Verrier, le rond indique l'emplacement
où Neptune a été découverte.
Cliquez sur l'image |
 |
Caricature par une dessinateur français de John Couch Adams |  |
Il y eut à l'époque une polémique sur cette découverte avec le jeune astronome anglais John Couch Adams (1819-1892), qui fit le même calcul que Le Verrier à peu prés au même moment. Il fût cependant pris de vitesse par Le Verrier, en effet Adams s'était adressé au Royal Observatory pour effectuer les observations. Mais cet observatoir ne possédait pas à l'époque de catalogue d'étoiles précis sur la région du ciel où Adams comptait observer, l'obligeant alors à faire plusieurs nuits d'observations pour déterminer si un objet est en déplacement. Ce temps perdu lui coûta la paternité de Neptune de très peu.
La découverte de Neptune était une fois de plus un succès retentissant de la théorie de Newton et assura la postérité à Le Verrier, dont on peut voir aujourd'hui la statue devant l'observatoire de Paris (rue Cassini).
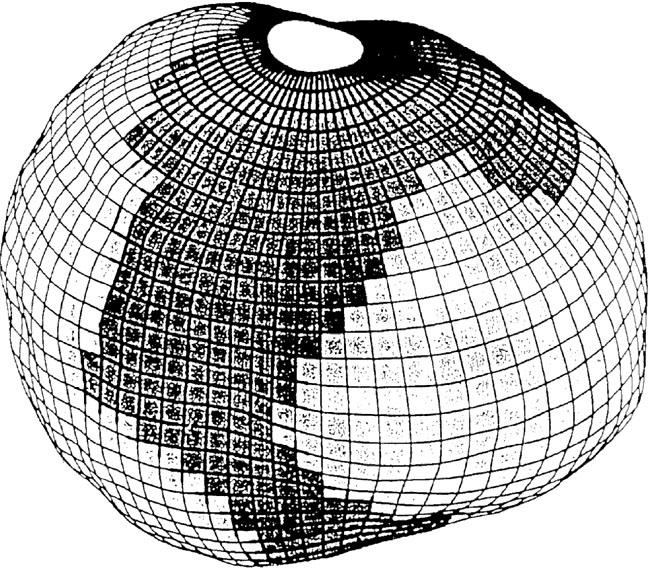
En 1661, l'astronome Huygens, proposa à l'Académie des Sciences une nouvelle définition pour l'unité de mesure des longueurs. Toute unité de mesure doit être définie de sorte que cette unité soit la même partout sur terre donc universelle. L'idée de Huygens était de prendre comme nouvelle unité de longueur, la taille de la corde d'un pendule qui bat exactement à la fréquence d'un battement par seconde. Cela devait être une longueur universelle, et Huygens supposait que cette longueur serait partout la même sur Terre. Hypothèse plus que raisonnable à priori. Cependant en 1671, après un voyage à Cayenne, Jean Richer, en voulant mesurer l'influence du passage proche de Mars sur le battement d'un pendule, trouva que quel que soit l'époque de l'année, un pendule ne battait à 1 Hertz (à Cayenne) que si la corde était plus courte de 3.5 mm que celle de Huygens (à Paris). C'est la théorie de Newton qui apporta l'explication à ce phénomène étonnant. Huygens, en supposant que le pendule devait battre partout à la même vitesse, faisait implicitement l'hypothèse que la Terre était parfaitement sphérique. En fait, la Terre étant en rotation sur elle-même, est soumise aux forces centrifuges qui vont avoir pour effet de la déformer, i.e. de l'enfler à l'équateur et de l'aplatir aux pôles. Cette répartition non isotrope de la masse a pour effet de modifier légèrement le champ de gravitation de la Terre en fonction de la latitude. Cette modification de l'intensité de la pesanteur a naturellement pour effet de modifier la vitesse de battement du pendule. Une fois de plus, Newton faisait les prédictions exactes.
| Image calculée
à partir de données d'altimétrie de la forme de la
Terre. La déformation est ici artificiellement augmentée.
On voit bien l'aplatissement aux pôles et le renflement à
l'équateur.
Cliquez sur l'image |
 |
Il serait long de dénombrer tous les succès de la théorie de Newton. En voici quelques-uns (en vrac) qui impliquèrent les plus grands scientifiques de l'époque : précession de l'axe de rotation de la Terre, mouvement de la Lune, calcul des longitudes terrestres.
Comme nous l'avons expliqué plus haut, le problème majeur de la mécanique céleste est le calcul des orbites d'un système composé de trois objets ,ou plus, en interaction. Bien que le problème n'ait pas de solution générale, il est possible sous certaines approximations de faire des prédictions sur le mouvement de ces corps. Nous présentons ici quelques-uns des résultats les plus connus.
6.2.1 Les marées et la limite de Roche
Le phénomène de marées s'explique facilement en étudiant le système Terre-Lune-Océan, et en supposant que l'Océan n'a pas de masse et donc pas d'influence sur le mouvement de la Terre ou de la Lune.
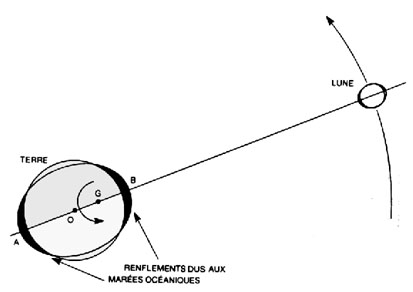
En effet, considérons le champ de gravitation de la Lune dans lequel se trouve la Terre. Ce champ n'est pas uniforme sur le globe terrestre. A un instant t, les régions terrestres les proches de la Lune seront plus fortement attirées vers cette dernière que les régions les plus éloignées. Si on appelle dG la variation du champ de gravitation de la lune par rapport à sa valeur au centre de la Terre, dG est positif en face de la Lune, et dG est négatif dans la région opposée.
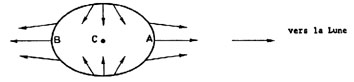 |
Bilan des forces exercées par la Lune sur la Terre, dans le repère du centre de la Terre |
Ainsi, l'océan va présenter deux bosses (il ne sera pas réparti de manière uniforme à la surface de la Terre) car le dG positif dans les régions en face de la Lune aura pour conséquence un soulèvement de l'océan à cet endroit (attiré par la Lune), de même, le dG négatif, de l'autre coté de la Terre, aura pour conséquence un autre soulèvement de l'océan et diamétralement opposé. A mi-chemin entre ces deux soulèvements, se trouvent, par symétrie, deux zones de hauteur d'eau minimum. L'explication des marées vient alors naturellement. Si on considère que la Terre dans sa rotation ne modifie pas trop la position de ces deux soulèvements marins, et que la lune est globalement fixe sur une journée, un point donné sur la Terre passera 1 fois par les 2 zones où l'eau est soulevée (marées hautes), et 1 fois par les deux zones où l'eau est basse (marée basse).
 |
On voit sur ce graphique les 2 bosses qui sont en phase avec la Lune, et les deux creux perpendiculaires. |
L'effet de marée est une conséquence directe d'un problème à trois corps simplifié (on a considéré que l'océan n'avait pas de masse). Dans la réalité, l'océan frotte sur la Terre, et on peut montrer également qu'il échange du moment cinétique avec la Lune, ce qui a pour effet de synchroniser la période de rotation de la Lune avec sa période de révolution (ce qui est aujourd'hui le cas puisque la Lune nous présente toujours la même face). Enfin, la dernière conséquence à long terme est l'éloignement de la Lune par rapport à la Terre.
En fait, on ne peut pas complètement négliger l'influence du Soleil pour l'étude des marées. En effet, par une explication équivalente à celle exposée plus haut, il est également à l'origine de marées, mais beaucoup plus faibles que les marées lunaires. En particulier, ce que l'on appelle les grandes marées s'explique par l'alignement de la Lune et du Soleil : si la Lune et le Soleil sont alignés du même coté par rapport à la Terre, leur champs de gravitation s'ajoutent (vectoriellement) et augmentent l'intensité des marées. Dans le cas contraire, i.e., quand la Lune et le Soleil sont alignés de part et d'autre de la Terre, leur champ de gravitation s'opposent, et diminuent ainsi l'effet des marées. C'est le phénomène inverse des grandes marées.
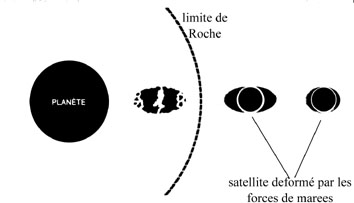
Cet effet de marée a de plus une conséquence surprenante, mise en évidence au 19ème siècle par le physicien Roche, phénomène connu sous le nom de limite de Roche, dont les implications sont nombreuses pour l'étude du système Solaire.
Considérons le système à trois corps suivant : une planète qui orbite autour du Soleil (de masse négligeable par rapport au Soleil) et un petit satellite qui tourne autour de cette planète (de masse négligeable par rapport à la planète ). Ce satellite est soumis aux forces de marées induites par la planète i.e. dG est positif face à la planète et dG et négatif sur la face opposée. Cela se traduit par une force d'attraction en direction de la planète pour les zones qui lui font face, et comme une force de répulsion du coté opposé. Par conséquent, un satellite est constamment tiraillé par ces deux forces de direction opposée.
| Souvent,
ces forces de marées n'ont pas beaucoup de conséquences,
car elles sont trop faibles (la Lune subit sans déformation notable
les forces de marées terrestres) : Dans le cas de la Lune, faite
de roche, les forces de cohésion internes sont suffisamment fortes
pour que les forces de marée ne la déforment pas la Lune.
Par contre, si ces forces sont comparables, voire plus grande que les forces
de cohésion internes du satellite, celui-ci va se déformer,
ou même se briser. Roche s'est intéressé au
cas d'école où la seule force de cohésion interne
du satellite est son auto-gravitation (c'est à dire que le satellite
est maintenu uniquement par sa propre gravitation, comme une étoile
par exemple). Roche a montré qu'il existe une distance (distance
planète -satellite) en dessous de laquelle le satellite est détruit
car les forces de marées deviennent trop fortes par rapport aux
forces de cohésion internes et déchirent le satellite.
Cette distance s'appelle la Limite de Roche.
|
 |
L'autre cas est celui des anneaux de Saturne. Ils s'étendent à peu près jusqu'à 140000 Km de la planète, qui est la limite de Roche de Saturne. En dessous de ce rayon, on n'observe aucun satellite d'importance, de plus, les anneaux sont composés de petits fragments de moins de 100 m (environ) de taille. Cela s'explique par le fait qu'en dessous du rayon de Roche, un satellite ne peut se former car il est déchiré par les forces de marées. Le seul moyen de subsister en dessous de ce rayon est d'être de petite taille, de sorte que les effets de marée sont atténués.
6.2.2 Les points de Lagrange d'une planète
Lagrange a étudié le cas de trois corps (Soleil, planète, petit corps), coplanaires. Il suppose que l'orbite de la planète autour du Soleil est une ellipse (solution du problème à deux corps). Il se pose la question de l'orbite du petit corps dans le cas où sa masse est négligeable devant celle de la planète. Il a montré qu'il existe 4 points particuliers autour de la planète (2 à 60° de part et d'autre de la planète sur son orbite, et 2 sur l'axe Soleil-planète, en avant et en arrière de la planète ).
| Deux sont stables (ceux à + ou - 60° sur l'orbite de la planète ), et deux instables, i.e. que si on place le petit corps dans un point stable et qu'on le perturbe, il revient naturellement à sa position d''équilibre, par contre, si on le place au sein d'un des deux autres points instables, la moindre perturbation le fera partir.Ces cas de figure, qui, il y a un siècle paraissaient purement académiques, se rencontrent en fait dans le système solaire : C'est le cas des astéroïdes Troyens, qui sont deux petits nuages d'astéroïdes sur l'orbite de Jupiter à + ou - 60° de la planète. Ils sont piégés dans les deux points stables de Lagrange de Jupiter. On le voit clairement sur un graphique représentant la position des astéroïdes dans le système solaire. | 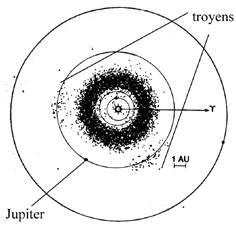 |
C'est là un phénomène extrêmement subtil et très mal compris. Une résonance apparaît quand la période de révolution d'un corps autour du Soleil est une fraction rationnelle de la période de révolution d'un autre corps dans le système Solaire : Par exemple, un corps en résonance 2 :1 avec Jupiter fera exactement 2 tours autour du Soleil pendant que Jupiter en fera 1. C'est en fait une situation dynamique complexe à étudier pour la raison suivante : un petit corps de position quelconque dans le système solaire, est naturellement perturbé par les autres planètes.
| Mais, au cours
de sa (longue) histoire, les perturbations se font globalement de manière
aléatoire et se moyennent globalement à zéro sur de
très longues périodes. Cependant, si ce petit corps est en
résonance avec une planète, les perturbations de celle-ci
se font toujours de même manière et toujours au même
endroit. Les effets perturbateurs de cette planète ne se moyenneront
donc pas du tout à zéro sur de très longues périodes.
L'orbite de ce corps se trouve alors très fortement perturbée,
au point où celui ci peut être parfois éjecté
de son orbite. Ce phénomène de résonance est en fait
très courant dans le système Solaire, par exemple, entre
les Satellites de Saturne ou de Jupiter. De plus, on a mis en évidence
dans la ceinture d'astéroïdes (entre Jupiter et Mars), des
zones de vide, qui sont en fait des zones de forte résonance avec
Jupiter.
|
| Ce graphique représente le nombre d'astéroïdes en fonction de leur distance au Soleil ( en UA, 1UA=150 109Km). On voit qu'aux résonances de Jupiter (1/4,1/3, etc.) il y a une forte dépopulation, preuve de l'influence de Jupiter. | 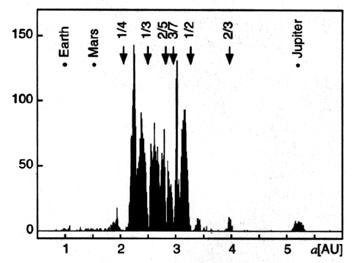 |
Les résonances sont l'équivalent exact des phénomènes de résonance que l'on peut rencontrer dans les circuits électriques ou les systèmes dynamiques. Quel que soit le système physique considéré, une résonance apparaît quand on excite un système à une fréquence qui correspond à une fréquence propre. La mécanique céleste ne fait pas exception.
6.2.4 Le Théorème du viriel pour la gravitation
Si on veut dépasser l'approximation à trois corps, pour étudier les galaxies par exemple, on ne possède que très peu d'outils mis à part l'intégration numérique sur ordinateur, mais qui, étant donné les capacités actuelles des machines (en constante évolution cependant) ne permettent pas de considérer un grand nombres d''objets. Une des approches possible est celle de la statistique. Le théorème du viriel gravitationnel nous dit comment de manière très globale, et avec très peu de détails, se comporte un système comportant N corps (N grand) en interaction gravitationnelle. C'est une balance entre l'énergie cinétique du système (somme des énergies cinétiques des composantes) et son énergie potentielle. Il s'énonce comme suit : Soit T l'énergie cinétique totale (somme des 0.5 mv2 ) et E l'énergie potentielle totale (somme des -Gm/r), alors, globalement :
Un cas particulièrement intéressant est celui d'un système qui perd de l'énergie (par frottement), comme un disque proto-planètaire, les anneaux de Saturne , ou plus généralement, tout ensemble de matière avec des frottements internes. Les frottements entraînent une diminution de T, et donc de E. E étant inversement proportionnel à R, R va augmenter, et donc le système va s'étaler. Ainsi, tout système auto-gravitant (une galaxie, un nuage, des anneaux planétaires etc.) avec des frottements internes (collisions, viscosité etc.) aura naturellement tendance à s'étaler.
6.3 L'échec de la découverte de Vulcain
| En
1846, la mécanique céleste est la reine des sciences, la
plus mathématisée et la plus exacte dans ses prédictions.
Comme Uranus, Mercure présente des variations inexpliquées
dans son orbite : son périhélie (le point, sur l'orbite de
Mercure, le plus proche du soleil), se déplace au cours du temps
(précession autour du Soleil) plus rapidement que prévu,
d'environ une demi minute d'arc par siècle ! Cette déviation,
bien que faible, doit être expliquée par la mécanique
Newtonienne. Le Verrier, fort de sa découverte de Neptune, imagina
alors, qu'une planète inconnue, entre Mercure et le Soleil, devait
perturber l'orbite de Mercure.
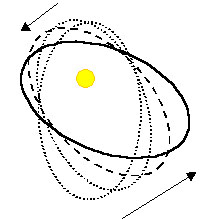
Précession du périhélie de Mercure: l'ellipse sur laquelle orbite Mercure "tourne" autour du Solei. |
 |
Il fit des calculs semblables à ceux faits quelques années avant pour découvrir Neptune, et annonça en 1859 les résultats de ces calculs : un corps d'environ la même taille que Mercure devrait orbiter à mi-distance du Soleil et pourrait être responsable de la précession du périhélie de Mercure. On l'appellera Vulcain.
Mais les tentatives pour observer Vulcain échouèrent toutes : étant donné que cette nouvelle planète était supposée être très proche du Soleil, il était impossible de l'observer la nuit. On profita d'une éclipse de Soleil pour rechercher dans le voisinage solaire, et en 1876 on crût même l'avoir identifié après avoir vu un point noir se déplacer devant le Soleil, mais finalement, ce n'était qu'une tache solaire.
Enfin, Vulcain n'a jamais pût être découvert, et demeura pendant longtemps le seul et unique phénomène astronomique non expliqué par la théorie de Newton. Il faut bien prendre conscience cependant que la précession du périhélie de Mercure est un effet extrêmement faible, 42 secondes d'arcs par siècle, (une seconde d'arc = 1/3600 degrés ! !) . Il n''y a vraiment pas beaucoup de domaines de la physique aujourd'hui où la précision recherchée soit du même ordre.
Quelle est l'origine de la précession du périhélie de Mercure ?
Il faut attendre encore quelques années pour qu'il trouve son explication, mais au passage il faudra une refonte totale de la théorie de la gravitation et une reformulation des principes de la mécanique. Ce sera la théorie de la relativité qui donnera l'explication de la précession du périhélie de Mercure.
Nous avons vu dans ce chapitre les multiples succès remportés par la théorie de la gravitation Newtonienne. Bien que la nature de cette force demeure très mystérieuse et son mode d'action inexpliqué, à la fin du 19éme siècle on pensait sérieusement avoir une description presque complète de l'univers physique et que celle-ci n'avait que peu d'avenir. Seuls deux phénomènes ne trouvaient pas encore leur explication : Leur rayonnement du corps noir et la précession du périhélie de Mercure. On n'imaginait pas à l'époque qu'il faudra deux nouvelles théories physique pour décrire ces, presque marginaux. En fait, le premier trouve sa solution dans la Mécanique Quantique, la deuxième, dans la théorie de la Relativité Générale comme nous allons le voir.
![]()
![]()
![]()